Faculty of Engineering & IT / Latest Research
focus on
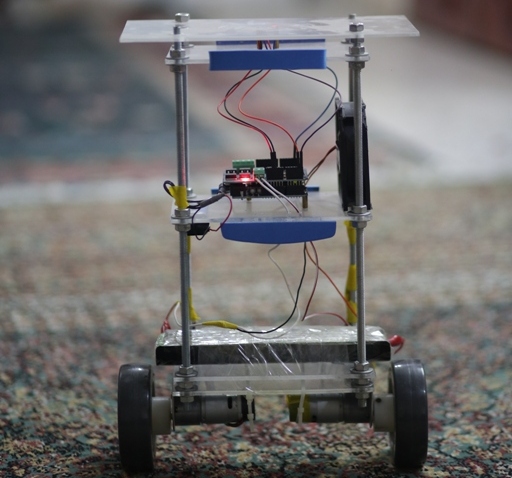
Two –Wheeled Self-Balancing Robot: New innovation for Mechatronics students
Aug 29, 2016 – In continuation of the innovative projects in the Faculty of Engineering and Information Technology at AUG, four Mechatronics students invented a "Self-Balancing Robot".
Dr. Ahmed Issa, Head of Engineering Dept. said, "the project is a very significant addition to the world of robots since it applies for the first time the principle of balance in the robot by using wheels ." He added that the primary motion came from the wheels which are integrated part in the robot, substituting the legs and joints.
The four students: Izzat Sbakhi, Mohammed Anouno, Ahmed Hamouda, and Amjad Siraj pointed out that they designed their project on inverted pendulum theory. The inverted pendulum is inherently unstable; therefore balancing it was a challenge they overcame by employing a proportional–integral–derivative controller (PID controller) to keep the robot balanced. PID controller measures the speed and direction of the required motors, depending on the signal issued from the sensors to work to maintain the balance of the robot.
The students explained that main aim of the project is achieving balance; hence the special structure of the robot must be vertical at a 90-degree angle to the ground to be stable. Therefore, they used a sensor to measure the tilt angle value of the robot's structure, and then send this value to Arduino microcontroller, where its software algorithms analyze the values ??received from the sensor to issue later commands to adjust the tilt process by sending "PWM" signal to "H-bridge" circuit which works to activate the role of motors associated with wheels either clockwise or counter-clockwise to get the self-balancing robot.